技术创新:多技术融合打造智能巡检利器
多源融合导航技术
煤矿井下环境复杂多变,GPS信号的缺失使得传统的定位导航技术难以为继。为攻克这一难题,该机器人创新性地融合了激光雷达、视觉相机与惯性测量单元(IMU),构建起一套先进的激光雷达惯性视觉里程测量系统(LIVO)。在实际工作中,激光雷达负责对周围环境进行高精度扫描,生成大量精确的点云数据,勾勒出矿井内的三维轮廓;视觉相机则敏锐地捕捉环境中的纹理信息,为机器人的视觉识别和特征提取提供丰富的细节支持;而惯性测量单元(IMU)则实时测量机器人的姿态和加速度变化,确保机器人在移动过程中的稳定性。

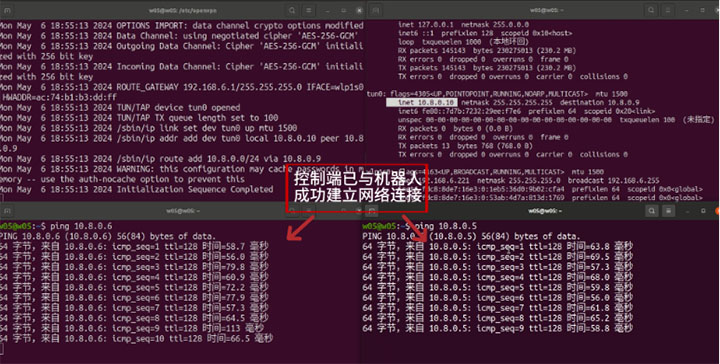
在矿井下,通信信号的微弱与不稳定一直是困扰巡检工作的难题。为确保机器人能够与地面控制中心保持实时、稳定的数据传输,该机器人采用了5G+VPN的通信方案。5G网络凭借其超高的带宽、极低的延迟以及卓越的可靠性,为机器人搭建起一条高速稳定的数据传输通道,让大量高清图像、视频以及传感器数据能够瞬间传输至地面控制中心,实现信息的无碍流通。而VPN技术则如同给这条数据传输通道披上了一层坚不可摧的铠甲,在此基础上构建起一个安全的虚拟专用网络,运用复杂的加密算法和身份验证机制,确保数据传输的保密性和完整性,有效抵御黑客攻击、数据泄露等安全威胁。通过将VPN部署于云服务器并与5G网络传输相结合,机器人无论身处矿井的哪个角落,无论周围环境多么恶劣,都能与控制中心建立起实时、安全的通信连接。
空地协同,广泛覆盖
传统的单一功能巡检机器人在面对煤矿井下复杂多变的作业环境时,往往力不从心。为了解决这一问题,该机器人创新性地采用了空地协同工作模式,打造了一个功能强大、覆盖面广的智能巡检机器人集群。集群中包括履带式巡检机器人、变胞式空地两栖巡检机器人和工作协助机器人等多种类型,它们各司其职、相互协作,共同完成矿井巡检任务。履带式机器人配备多种高精度传感器,能够在狭窄崎岖的巷道中稳健前行,对井下设备和环境进行近距离、全方位的检测。它的履带设计使其具备强大的越障能力,无论是碎石、泥泞还是水坑,都能轻松跨越,确保巡检任务不受地形限制。变胞式空地两栖机器人则凭借其独特的模态切换系统,能够根据任务需求在陆地行驶和空中飞行模式间自由切换,展现出超凡的灵活性和适应性。
性能卓越:稳定可靠的矿山安全卫士
VR+数字孪生技术
为了给操作人员提供一个直观、便捷且沉浸式的远程监控和操作体验,机器人配备了先进的VR+数字孪生技术。通过在VR平台下精心构建矿井的数字孪生模型,操作人员仿佛置身于矿井之中,亲身体验机器人的巡检过程。在这个高度逼真的虚拟环境中,操作人员可以360度无死角地观察矿井的每一个细节,实时获取机器人的位置、姿态、传感器数据等丰富信息,精准掌握机器人的工作状态。

该项目能够取得如此显著的成果,离不开黑龙江科技大学资深教授的悉心指导。这些指导教师在机器人技术、自动化控制、人工智能等领域拥有深厚的专业知识和丰富的科研经验。在项目研发过程中,指导教师们全程参与,为团队提供了全方位的技术指导和支持。从项目的选题、方案设计,到技术实现、测试优化,每一个环节都凝聚着他们的智慧和心血。在团队遇到技术难题时,指导教师们凭借其深厚的学术造诣和实践经验,能够迅速洞察问题的本质,为学生提供关键性的指导和建议,帮助团队突破技术瓶颈,确保项目的顺利推进。他们不仅是团队的技术导师,更是团队的精神领袖,激励着学生们不断追求卓越,勇攀科学高峰。

随着国家对煤矿安全生产和智能化建设的重视程度不断提高,煤矿企业面临着日益严格的监管要求和激烈的市场竞争。该煤矿智能协作式巡检机器人的问世,为煤矿企业带来了一种全新的智能化巡检解决方案,有望在多个方面为煤矿企业带来显著的效益。它将大大减少人工巡检的频次和工作量,降低企业的人力成本投入。同时,机器人能够实时监测矿井环境和设备状态,及时发现潜在的安全隐患并发出警报,有效提升矿山安全水平。此外,机器人高效的巡检能力和快速响应机制,能够及时发现设备故障和生产过程中的问题,减少设备停机时间和生产中断的频率,提高生产的连续性和稳定性,增加经济效益。目前,该项目已与多家大型煤矿企业达成合作意向,成果转化前景广阔,将为煤炭工业的安全生产和智能化发展注入强大动力。